RS232C(僔儕傾儖億乕僩)偵愙懕偡傞斈梡擖椡丄斈梡弌椡梡僀儞僞乕僼僃僀僗俀
乮8僠儍儞僱儖傾僫儘僌擖椡丄8價僢僩僨僕僞儖擖椡丄俉價僢僩亊俀僨僕僞儖弌椡乯
仠奣梫
丂僷僜僐儞偺斈梡I/O僀儞僞乕僼僃僀僗傪幚尰偡傞偨傔偺傕偺偱偡丅
PIC(儚儞僠僢僾儅僀僐儞)傪棙梡偟偰丄傾僫儘僌擖椡俉僠儍儞僱儖丄僨僕僞儖擖椡俉價僢僩丄僨僕僞儖弌椡俉價僢僩亊俀傪桳偟偰偄傑偡丅
僷僜僐儞偵偼RS-232C(僔儕傾儖)億乕僩傪捠偟偰捠怣傪峴偄傑偡丅傾僫儘僌擖椡偺AD曄姺偼侾侽價僢僩偱偁傝丄侾侽價僢僩抣傪偦偺傑傑曉偟傑偡丅
丂壏搙僙儞僒乕丄婥埑僙儞僒乕丄壛懍搙僙儞僒乕側偳傪愙懕偡傞偙偲偵傛偭偰僷僜僐儞偱偺僨乕僞偺廂廤傗丄SSR摍傪愙懕偟丄條乆側婡婍偺惂屼偵墳梡偑壜擻偱偡丅
丂傑偨丄孞傝曉偟張棟丄PIC扨懱張棟偵懳墳偟偰偍傝乮徻嵶偼暿婰乯丄偛偔娙扨側僔乕働儞僒乕揑側張棟偑壜擻偱偁傝丄偛帺恎偱僐儅儞僪傪嶌惉偡傞偙偲偵傛偭偰條乆側摦嶌傪偝偣傞偙偲偑偱偒丄旕忢偵峀斖埻偵墳梡壜擻偱偡丅
丂RS232C偲偺愙懕偵MAX232傪徣棯偟偨娙堈僀儞僞乕僼僃僀僗偲偟偰偄傑偡丅挿嫍棧揱憲偡傞応崌偼丄MAX232摍傪巊梡偟偨夞楬偵曄峏偡傞昁梫偑桳傞偲巚傢傟傑偡丅
仠偍憲傝偡傞晹昳儕僗僩
| 晹昳柤 |
宆幃摍 |
悢検 |
| PIC |
16F887 |
侾屄 |
| IC僜働僢僩 |
40僺儞 |
侾屄 |
| D-SUB僐僱僋僞 |
儊僗 |
侾屄 |
| 掞峈 |
1k兌丄33k兌慜屻亊2杮 |
堦幃 |
| LED |
愒怓摍 |
侾屄 |
仠巇條
丂丒揹尮揹埑偼俆倁傑偨偼偦偺嬤朤偱偍巊偄偔偩偝偄丅
丂丒RS-232C偺捠怣懍搙偼9600bps偱偡(俉價僢僩丄僷儕僥傿乕柍偟丄僗僩僢僾價僢僩侾丄僼儘乕柍偟)丅
丂丒僨乕僞僒儞僾儕儞僌丄惂屼弌椡偺廃婜偼巊梡忦審偵曄壔偡傞偐傕偟傟傑偣傫丅嵟戝偱悢夞乛昩掱搙偲偍峫偊偔偩偝偄丅
丂丒揹尮傪俙乛俢僐儞僶乕僞偺儗僼傽儗儞僗偲偟偰巊偭偰偍傝傑偡偺偱丆埨掕乮壏搙揑偵傕乯偟偨俆倁偺揹尮偑昁梫偱偡丅
丂丒僨僕僞儖弌椡偼丄8價僢僩枅(億乕僩枅)偵峴偆偙偲偑偱偒傑偡丅
丂丒傾僫儘僌擖椡偺擖椡僀儞僺乕僟儞僗偼僆儁傾儞僾摍傪棙梡偟弌棃傞偩偗掅偄傕偺傪巊梡偟偰偔偩偝偄丅帪娫墳摎偼媇惖偵側傝傑偡偑丄0.1uF掱搙偺僐儞僨儞僒傪巊梡偡傞偙偲偱斾妑揑崅僀儞僺乕僟儞僗偱傕巊梡壜擻偱偡丅
丂丒PC偐傜偺僐儅儞僪偺憲弌廃婜偑抁偡偓傞偲惓忢偵摦嶌偟傑偣傫丅昁梫偵墳偠偰曉摎傪妋擣偟偰壓偝偄丅
丂丒PIC偺俇斣僺儞傪Vdd乛GND偵愙懕偡傞偙偲偵傛偭偰丄僷僜僐儞偲偺僨乕僞怣崋傪榑棟斀揮偱偒傑偡丅偙傟偵傛偭偰丄MAX232摍偺儗儀儖曄姺俬俠傪巊梡偡傞嵺偼俇斣僺儞傪GND偵愙懕偟偰偔偩偝偄丅
仠僨乕僞梫媮摍偺僐儅儞僪
丂丒乽傾僫儘僌擖椡乿丄乽僨僕僞儖擖椡乿丄乽僨僕僞儖弌椡乿丄乽僂僃僀僩乿丄乽孞傝曉偟乿偺俆庬椶偑桳傝傑偡丅傑偨忦審偵傛偭偰張棟傪峴偆乽忦審敾掕乿偑桳傝傑偡丅
丂丒惓忢偵庴偗晅偗偨偙偲傪妋擣偡傞偨傔丄庴怣偟偨僐儅儞僪傪偦偺傑傑曉偟傑偡丅傑偨丄壓婰偺僼僅乕儅僢僩偲堦抳偟側偄応崌傗丄僐儅儞僪偑96僶僀僩傛傝挿偡偓傞応崌偼乽ERR乿傪曉偟傑偡丅
丂丒傑偨丄偦傟偧傟偺僐儅儞僪偼撪晹偱張棟偟傗偡偄宍偵曄姺偟傑偡偑丄僗僥僢僾悢偑47傪墇偊傞偲幚峴弌棃偢偵乽ERR乿傪曉偟傑偡丅
丂丒乽傾僫儘僌擖椡乿偺俙乛俢曄姺屻偺悢抣偺庢摼偼丄乽g0乿偵懕偄偰僠儍儞僱儖斣崋乮乽0乿乣乽7乿乯傪憲怣偟傑偡丅椺丗7僠儍儞僱儖偵擖椡偝傟偰偄傞傾僫儘僌揹埑偺俙乛俢曄姺抣偼丄乽g07乿傪憲怣偡傞偙偲偵傛偭偰侾侽恑悢偱庢摼偱偒傑偡丅
丂丒乽僨僕僞儖擖椡乿偺庢摼偼丄乽z乿傪憲怣偡傞偙偲偵傛偭偰億乕僩偺忬懺傪俉價僢僩偲峫偊丄侾侽恑悢偱曉偟傑偡丅
丂丒壓婰偺孞傝曉偟張棟傪巊偭偰丄傾僫儘僌擖椡丄僨僕僞儖擖椡傪帺摦揑偵楢懕揑偵峴偆偙偲傕壜擻偱偡丅椺偊偽丄乽g00L乿偲偡傟偽丄0僠儍儞僱儖偺傾僫儘僌擖椡偺A/D曄姺抣傪孞傝曉偟庴偗庢傞偙偲偑壜擻偱偡乮張棟偼彮偟抶偄偱偡乯丅
丂丒乽僨僕僞儖弌椡乿偼丄X,Y偺俀偮偺億乕僩偵憲怣偟傑偡丅僐儅儞僪偼丄億乕僩柤乮乽X乿傑偨偼乽Y乿乯偵懕偄偰侾俇恑悢俀寘偱巜掕偟傑偡丅椺丗億乕僩倄傪偡傋偰俫偵偡傞偺偼乽YFF乿傪憲怣偟傑偡丅
丂丒乽僂僄僀僩乿偼0.1昩扨埵偱巜掕偡傞偙偲偑弌棃傑偡丅乽w乿偵懕偔俀寘偺侾侽恑悢偱巜掕偟傑偡丅1昩偺僂僄僀僩偼乽w10乿偲偟傑偡丅9.9昩埲忋偺僂僃僀僩偑昁梫側応崌偼丄偙偺僐儅儞僪傪暋悢孞傝曉偡偙偲偱壜擻偱偡丅帪娫惛搙偼偦傟傎偳崅偔側偄偱偡丅
丂丒孞傝曉偟僐儅儞僪偼乽L乿偱偡丅孞傝曉偟僐儅儞僪偼捠忢偼堦楢偺嵟屻偵抲偒丄偙傟偵傛偭偰嵟弶偵張棟偑栠傝傑偡丅傑偨丄偙偺僐儅儞僪傪幚峴偡傞偲乽CONTINUE乿傪曉怣偟傑偡丅忦審敾掕暥偺拞偵傕擖傟傞偙偲偵傛偭偰懡嵤側張棟偑壜擻偲側傝傑偡丅
丂丒傾儖僼傽儀僢僩偺戝暥帤偲彫暥帤偼乮忦審敾掕偺乽z乿偍傛傃乽Z乿偺傒椺奜乯摨條偵巊梡壜擻偱偡丅
丂丒僴僀僷乕僞乕儈僫儖偱偼側偔丄僾儘僌儔儉傪嶌惉偡傞応崌丄堦楢偺僐儅儞僪偺嵟屻偵夵峴僐乕僪傕憲怣偟偰偔偩偝偄(0x0d傑偨偼0x0a)丅傑偨丄PIC偐傜偺墳摎偺嵟屻偵偼0x0a偺傒傪憲怣偟傑偡丅僴僀僷乕僞乕儈僫儖偱偼惓忢乮師峴愭摢乯偵夵峴偑峴傢傟傑偣傫乮壓婰偺摦嶌椺傪僉儍僾僠儍偟偨屻偵曄峏偟傑偟偨丅乯丅
丂丒僂僃僀僩傪拞抐偟偨偄応崌偼丄壗偐侾暥帤傪憲怣偟傑偡乮孞傝曉偟張棟偺拞偵僂僃僀僩偑柍偄摍丄張棟忬懺偵傛偭偰偼拞抐傪庴偗晅偗偵偔偄帪偑桳傝傑偡偺偱丄偦偺応崌偼憲怣傪孞傝曉偟偰偔偩偝偄丅乯丅
丂丒僴僀僷乕僞乕儈僫儖傪巊梡偟偨摦嶌偺椺偑壓偵桳傝傑偡丅
丂丒椺丗
丂丂乽XFFw20YFFw10X00乿偲偡傞偲丄億乕僩X傪0xFF偲偟丄俀昩屻偵億乕僩Y傪0xFF偲偟丄侾昩屻偵億乕僩X傪0x00偲偟傑偡丅
仠忦審敾掕偺暥朄
丂忦審敾掕偼丄乽if丂...then丂...else丂... endif乿傪僀儊乕僕偟偰嶌惉偟傑偟偨丅惂栺偼懡偄偱偡偑丄娙扨側摦嶌側傜僾儘僌儔儉壜擻偱偡丅
丂惂栺侾丗if暥偺拞偵if暘傪擖傟傞傛偆側峔憿傗丄暋悢偺忦審偺and,
or傪敾掕偡傞偙偲偼偱偒傑偣傫丅
丂惂栺俀丗忦審偑堦抳偟偨応崌偺張棟偼壜擻偱偡偑丄忦審偑惉棫偟側偐偭偨偲偒偺張棟乮else埲壓乯偺張棟偼捈愙偱偒傑偣傫偺偱岺晇偑昁梫偱偡丅
丂惂栺俁丗傾僫儘僌擖椡偺斾妑偼丄"<"偍傛傃">"偺傒偑壜擻偱偁傝丄"="丄"<="丄"=>"偼巊偊傑偣傫丅
丂忦審敾掕暥偼丄暥帤楍傪偱偒傞偩偗抁偔昞尰偱偒傞傛偆偵丄乽if乿偲偄偆暥帤楍傪徣棯偟傑偡丅傑偨丄忦審婰弎晹暘偱丄傾僫儘僌擖椡偼乽g0乿乣乽g7乿偲昞尰偟傑偡乮乽0乿傪徣偒傑偡乯丅
丂椺偊偽乽(g0<512,xff)乿偲僇僢僐偱偔偔傞暥傪忦審敾掕暥偲夝庍偟丄乽,乿傛傝慜偑忦審丄屻偑忦審偑堦抳偟偨偲偒偵幚峴偡傞僐儅儞僪傪堄枴偟丄偙偺応崌0僠儍儞僱儖偺傾僫儘僌擖椡傪A/D曄姺偟丄偦偺抣偑512枹枮偺応崌丄億乕僩倃傪偡傋偰H偵偟傑偡丅
丂傑偨丄忦審敾掕暥偺忦審晹暘偱丄僨僕僞儖擖椡偵娭偡傞婰弎偼價僢僩枅偺敾掕偲丄俉價僢僩偡傋偰偺敾掕偑偁傝丄偲傕偵z丄Z傪巊梡偟丄師偺條偵婰嵹偟傑偡丅
丂價僢僩枅偺敾掕偼丄z傑偨偼Z偵懕偔悢抣偑價僢僩傪堄枴偟丄彫暥帤偺z偼擖椡偑L傪丄戝暥帤偺Z偼擖椡偑H偱桳傞偙偲傪昞偟傑偡丅椺偊偽乽(z0,x00)乿偲婰嵹偡傞偲丄僨僕僞儖擖椡偺0價僢僩乮嵟壓埵價僢僩乯偑L偺応崌億乕僩倃傪偡傋偰L偵偟傑偡丅
丂俉價僢僩偡傋偰偺敾掕偼乽Z=乿傑偨偼乽Z!乿偵懕偒俀寘偺侾俇恑悢乮俉價僢僩暘乯傪婰弎偟傑偡丅椺偊偽乽Z=aa乿偲偼乽僨僕僞儖擖椡偑0xaa偲堦抳乿傪乽Z!12乿偲偼乽僨僕僞儖擖椡偑0x12偲晄堦抳乿傪堄枴偟傑偡丅
丂偙傟傜僨僕僞儖擖椡偵娭偡傞忦審暥偵偮偄偰偺傒戝暥帤偲彫暥帤傪嬫暿偟傑偡丅
丂暥復偱昞尰偡傞偲擄偟偄偱偡偑丄傢偐傝傗偡偄傛偆偵壓婰偵椺暥傪婰嵹偟偰偍偒傑偡丅
丂傑偨丄忦審偵堦抳偟偨応崌偼乽TRUE乿傪丄堦抳偟側偐偭偨応崌偼乽FALSE乿傪曉偟傑偡丅
仠PIC扨懱張棟
丂僷僜僐儞偲愙懕偟側偔偰傕扨懱偱張棟傪偡傞偙偲偑偱偒傞婡擻偱偡丅
丂僷僜僐儞偐傜憲偭偨僐儅儞僪傪夝愅偟偨屻偵偦偺搒搙撪晹偺EEPROM偵曐懚偟偰偍傝傑偡丅傑偨丄揹尮搳擖帪偵丄EEPROM偺拞恎傪妋擣偟丄夝愅嵪傒僐儅儞僪偑曐懚偝傟偰偄傞応崌丄偦傟傪幚峴偟傑偡乮偙偺帪僷僜僐儞偼晄梡偱偡乯丅
丂梫偡傞偵丄僷僜僐儞偱僐儅儞僪傪彂偒崬傒丄僷僜僐儞柍偟偱僐儅儞僪傪幚峴偡傞偙偲偑偱偒傑偡丅傑偨丄傾僫儘僌擖椡丄僨僕僞儖擖椡偺忬懺偵傛偭偰張棟傪曄偊傞條側乽忦審敾掕乿傕壜擻偱偡丅
丂偙傟傪巊偊偽丄PIC扨懱偱丄椺偊偽丄僀儖儈僱乕僔儑儞揑偵LED傪弴師揰摂偡傞傕偺偺條偵僔乕働儞僒乕揑偵摦嶌偝偣傞僆儕僕僫儖夞楬傪惢嶌壜擻偱偡丅
丂僷僜僐儞偲愙懕偟偰僐儅儞僪傪彂偒崬傓偨傔偺婎斅偲幚嵺偵慻傒忋偘傞婎斅傪暿乆偵嶌惉偟偨応崌丄屻幰偺婎斅偱偼丄D-SUB僐僱僋僞丄LED丄掞峈摍偺僷僜僐儞愙懕偺偨傔偺僷乕僣偑晄梡偱偁傞偨傔丄戝曄僔儞僾儖側夞楬峔惉偲側傝傑偡丅
丂乮拲堄乯PC偐傜偺惓忢側僐儅儞僪庴怣偺偨傃偵EEPROM偵彂偒崬傓偨傔丄彂偒崬傒夞悢偑憡摉懡偔側傞応崌側偳偼EEPROM偑庻柦偵払偟偰偟傑偄巊偊側偔側傞壜擻惈偑桳傝傑偡丅EEPROM偑巊梡偱偒側偔側偭偰傕撪晹俼俙俵傪巊梡偟偨PC偲偺楢実張棟偼壜擻偱偡偑丄扨懱張棟偼巊梡偱偒側偔側偭偰偟傑偄傑偡丅
仠僐儅儞僪偺椺
丂椺丗乽x01y80x02y40x04y20x08y10x10y08x20y04x40y02x80y01x00y00L乿偺幚峴椺
丂丂丂http://www.youtube.com/watch?v=KtuOPa35-kE
丂丂丂LED偺僀儖儈僱乕僔儑儞偱偡
丂椺丗乽x01w02x02w02x04w02x08w02x00w01y80w01y40w01y20w01y10w01y08w01y04w01y02w01y01w01y00L
乿偺幚峴椺
丂丂丂http://www.youtube.com/watch?v=PWvCZzUL9AQ
丂丂丂LED偺僀儖儈僱乕僔儑儞偱偡
丂椺丗乽(z7,x01w02x03w02x02w02x06w02x04w02x0cw02x08w02x18w02x10w02x11w02)x01L乿偺幚峴椺
丂丂丂俆憡偺僗僥僢僺儞僌儌乕僞偺侾亅俀憡椼帴傪幚尰偟偰偄傑偡丅僨僕僞儖擖椡偺價僢僩俈偑俴偵側傞偙偲偵傛偭偰摦嶌偟傑偡丅傢偐傝傗偡偄傛偆僗僺乕僪傪壓偘傞偨傔丄奺僗僥僢僾娫偵0.2昩偺僂僃僀僩傪擖傟偰偄傑偡丅
丂丂丂http://www.youtube.com/watch?v=JMIliyoMNwk
丂椺丗乽(g0<100,x00L)(g0<200,x01L)(g0<300,x02L)(g0<400,x04L)(g0<500,x08L)(g0<600,x10L)L
乿偺幚峴椺
丂丂丂http://www.youtube.com/watch?v=lBUO1UvLaA4
丂丂丂儗儀儖儊乕僞揑偵摦嶌偟傑偡丅僠儍儞僱儖侽偺傾僫儘僌擖椡偺悢抣偵傛偭偰億乕僩倃偺LED偺揰摂埵抲偑堏摦偟傑偡丅
丂偦偺懠丄傾僫儘僌擖椡傗僨僕僞儖擖椡偵墳偠偰俈僙僌儊儞僩LED傪昞帵偝偣傞側偳偑峫偊傜傟傑偡丅
丂傑偨丄傾僫儘僌擖椡偵壏搙僙儞僒乕傪愙懕偟丄壏搙偑忋徃偟偁傞抣偵側傟偽僼傽儞梡ON弌椡丄偝傜偵壏搙偑忋徃偡傟偽俀戜栚偺僼傽儞梡ON弌椡側偳傕壜擻偱偡丅
仠墳梡椺
丂丒壏搙側偳偺挿婜寁應
丂丒傾僫儘僌抣偺娔帇
丂丒徠柧摍偺惂屼
仠捠怣僜僼僩
丂捠怣僜僼僩偼揧晅偟偰偍傝傑偣傫丅WINDOWS晅懏偺僴僀僷乕僞乕儈僫儖摍偑巊梡壜擻偱偡丅
丂億乕僩悢偑彮側偄16F88梡偺傕偺偱偡偑丄EXCEL儅僋儘偱嶌惉偟偨暔偑桳傝傑偡丅偙偪傜傪偛棗捀偗傟偽偲巚偄傑偡丅
仛巇條曄峏懳墳偺斖埻
丂丒巇條曄峏偼偁傝傑偣傫
仠僒億乕僩偵偮偄偰
丂僐儅儞僪偺嶌惉埶棅傗丄栤偄崌傢偣摍偼偛墦椂婅偄傑偡丅傑偨忋婰暥椺偱偼摦嶌偡傞偙偲傪妋擣偟偰偍傝傑偡偑丄憐掕奜偺僐儅儞僪偵傛偭偰惓忢偵張棟偱偒側偄偙偲偑桳傞偐傕偟傟傑偣傫丅偙偺応崌偺曗彏偼偍嫋偟婅偄傑偡丅
仠椶帡昳偵偮偄偰
丂18僺儞偺僐儞僷僋僩側PIC乮16F88乯傪巊梡偟偨暔傕嶌惉偟偰偍傝傑偡丅
丂
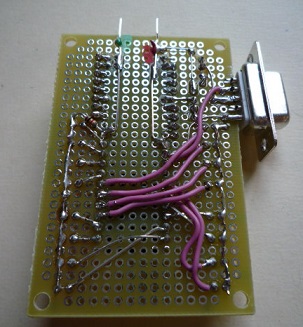
僥僗僩夞楬乮D-sub俁斣僺儞偺僾儖僟僂儞掞峈枹幚憰乯
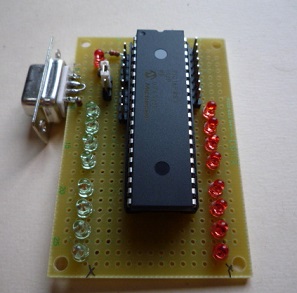
僥僗僩夞楬乮D-sub俁斣僺儞偺僾儖僟僂儞掞峈枹幚憰乯
僥僗僩夞楬偺夞楬恾
僴僀僷乕僞乕儈僫儖偺摦嶌椺
(偙傟偱偼丄僂僃僀僩偼侾昩扨埵偱巜掕偟偰偍傝傑偡偑丄尰嵼偺巇條偱偼0.1昩扨埵偲側偭偰偄傑偡丅傑偨丄夵峴僐乕僪尒捈偟偺偨傔尰嵼偺暔偲偼昞帵偑彮偟堎側傝傑偡丅)
僴僀僷乕僞乕儈僫儖偺愝掕
仠僆乕僋僔儑儞娭學僩僢僾儁乕僕傊(懠偵傕偄傠偄傠偲弌昳偟偰偄傑偡)
仠PIC娭楢偺弌昳暔偺擖嶥傪峫偊偰偄傞曽偵乮昁偢偍撉傒壓偝偄乯