PIC12F683(俉僺儞)傪巊偭偨僗僥僢僺儞僌儌乕僞僪儔僀僽梡PC僀儞僞乕僼僃僀僗
仠奣梫
丂PIC(儚儞僠僢僾儅僀僐儞)傪棙梡偟偰僷僜僐儞傪梡偄偰僗僥僢僺儞僌儌乕僞乕傪惂屼偱偒傑偡丅
PIC12F683傪俀屄巊偭偨旕忢偵僔儞僾儖側夞楬偱俀屄偺儌乕僞傪惂屼偱偒傑偡乮PIC侾屄偱侾屄偺儌乕僞傪惂屼偱偒傑偡乯丅
PIC偺撪晹偱偼RS232C偺捠怣偲丆僗僥僢僾摦嶌偲俀偮偺巇帠傪偙側偟偰偄傑偡丅
僷僜僐儞偲偼RS232C乮COM億乕僩乯偱愙懕偟傑偡丅
COM億乕僩偵懳偟偰丆僐儅儞僪傪憲傞偲丆偦傟偵廬偭偰僗僥僢僾偟傑偡丅
傑偨丆僐儅儞僪丆僗僥僢僾悢傪曉怣偟傑偡偺偱丆僐儅儞僪偑庴偗晅偗傜傟偨偐偳偆偐偺妋擣傕偱偒傑偡丅
仠偍憲傝偡傞晹昳儕僗僩
| 晹昳柤 |
宆幃摍 |
悢検 |
| PIC |
12F683(儌乕僞斣崋0,1傪彂偒崬傒嵪傒) |
俀屄 |
| 僩儔儞僕僗僞傾儗僀 |
TD62083 |
侾屄 |
| SW僟僀僆乕僪 |
1N4148乮傑偨偼戙梡昳乯 |
俀屄 |
| 儌僯僞梡LED |
乮愒丄椢側偳丄宍幃晄柧乯 |
侾屄 |
| 掞峈 |
侾侽侽丆俆侾侽兌丄侾k兌丄侾侽乣侾侽侽k兌 |
奺侾屄 |
| 僐儞僨儞僒 |
100uF |
侾屄 |
| D-SUB僐僱僋僞 |
儊僗 |
侾屄 |
丂丂PIC偲僩儔儞僕僗僞傾儗僀傪慻傒崌傢偣偰僥僗僩偟偨屻偵弌壸抳偟傑偡丅
(2007擭1寧18擔偐傜曄峏)
仠巇條
丂丒RS-232C偺捠怣懍搙偼9600bps偱偡丅
丂丒夞楬傪僔儞僾儖偵偡傞偨傔丄僋儕僗僞儖丄僙儔儘僢僋側偳偼巊梡偣偢丄PIC撪憼僋儘僢僋傪巊梡偟偰偄傑偡丅
偦偺偨傔丄巊梡壏搙側偳偺忦審偵傛偭偰偼惓忢偵捠怣弌棃側偔側傞壜擻惈偑偁傝傑偡丅弌壸慜偵幒壏偱僥僗僩傪峴偭偨忋弌壸偄偨偟傑偡丅
(撪憼僋儘僢僋偱傕19200bps偺捠怣偑壜擻偱偟偨丅條乆側忦審偱傕埨掕偵摦嶌偡傞傛偆偵丄崱夞偼僗僺乕僪傪棊偲偟偨9600bps偲偟傑偡丅)
丂丒椼帴曽幃偼侾亅俀憡椼帴偱偡丅
丂丒僗僥僢僾懍搙傕曄峏偱偒傑偡(壓婰偺乽惂屼僐儅儞僪乿嶲徠)丅
丂丒惂屼僐儅儞僪偵娭偟偰偼暿搑婰嵹抳偟傑偡丅
丂丒愭偺僐儅儞僪幚峴乮僗僥僢僾乯拞偵師偺僐儅儞僪偑偁偭偨応崌丆愭偺僐儅儞僪乮強掕偺僗僥僢僾悢乯偑廔椆偟偰偐傜師偺僐儅儞僪傪幚峴偟傑偡丅
僗僥僢僾偑捛偄偮偐偢偵僐儅儞僪偑楢懕揑偵憲傜傟偨応崌丆僐儅儞僪傪64屄PIC撪偺僶僢僼傽偵拁偊傑偡丅僶僢僼傽悢傪僆乕僶乕偟側偄傛偆偵偟偰壓偝偄丅枩堦僆乕僶乕偟偨応崌偼僄儔乕傪曉偟傑偡偺偱丄揔愗側僄儔乕張棟偟偰偔偩偝偄丅
丂丒PIC撪偱偼丄僐儅儞僪偺庴怣偲儌乕僞偺僗僥僢僾摦嶌偺椉曽傪幚峴偟偰偄傑偡丅偦偺偨傔丄偄偭偨傫僐儅儞僪傪庴怣偟偨傜丄偁傞堦掕帪娫僐儅儞僪傪庴偗晅偗偱偒側偔側傝傑偡丅僐儅儞僪傪楢懕揑憲傝偨偄偲偒偵偼堦掕偺娫妘乮惓妋偵偼暘偐傝傑偣傫偑丄偨傇傫10ms僆乕僟乕乯偱憲怣偡傞昁梫偑偁傝傑偡丅
丂丒僴僀僷乕僞乕儈僫儖側偳偺捠怣僜僼僩偱傕摦嶌妋擣偱偒傑偡偑丆僐儅儞僪暥帤楍偼堦搙偵傑偲傔偰憲傞昁梫偑偁傝傑偡丅乽僉乕懪偪崬傒乿偱偼側偔暥帤楍偺乽揬傝晅偗乿傪棙梡偟偰壓偝偄丅
丂丒惂屼僾儘僌儔儉偼揧晅偟傑偣傫丅Visual Basic 偱嶌惢偟偨僜乕僗僼傽僀儖偼壓婰偵岞奐抳偟傑偡丅
仠惂屼僐儅儞僪偵偮偄偰乮弶婜偺傕偺偐傜僶乕僕儑儞傾僢僾偟傑偟偨丅媽僶乕僕儑儞偺巇條偼偙偪傜丅乯
丂僐儅儞僪偺庬椶偼壓婰偺捠傝偱偡丅x,y偺強偵偼悢帤偑擖傝傑偡丅
丂丒'CxLyyy' : 儌乕僞斣崋x偺儌乕僞傪yyy僗僥僢僾偟傑偡丅yyy偼000乣100偺斖埻偱偡丅乮椺'C0L020':儌乕僞斣崋侽斣偺儌乕僞傪20僗僥僢僾偟傑偡丅乯丂000側傜僗僥僢僾偣偢忬懺偺庢摼偵棙梡偟傑偡丅
丂丒'CxRyyy' : 忋婰偲偼斀懳曽岦偵yyy僗僥僢僾偟傑偡丅yyy偼000乣100偺斖埻偱偡丅
丂丒'CxSyyy' : 僗僥僢僾偺懍偝傪曄峏偟傑偡丅yyy偼000乣009偺斖埻偱偡丅
丂丂000偺偲偒偑嵟傕抶偔1昩偁偨傝偍傛偦4僗僥僢僾偱偡丅1憹偊傞偛偲偵偍傛偦2攞偲側傝傑偡乮憗偔側傟偽側傞傎偳岆嵎偑戝偒偔側傝丄僐儅儞僪庴晅傕僄儔乕偑敪惗偟傗偡偔側傞偲巚偄傑偡乯丅弶婜抣偼003偱偁傝1昩偁偨傝偍傛偦32僗僥僢僾偱偡丅巊梡偡傞儌乕僞偵傕傛傝傑偡偑000乣005偺斖埻偱巊梡偡傞偙偲傪偍偡偡傔偟傑偡丅
丂丒'CxSTOP' : 僶僢僼傽偵拁愊偝傟偨僐儅儞僪偵偐偐傢傜偢丆嫮惂揑偵偡偖偵掆巭偟傑偡丅乮椺'C1STOP':儌乕僞斣崋侾斣偺儌乕僞傪偡偖偵掆巭偟傑偡丅乯
丂僐儅儞僪偵懳偡傞墳摎偲偟偰壓婰偺暥帤楍偑婣偭偰偒傑偡丅
丂丒'OK:Cx????:yyyyy'丂丗僐儅儞僪傪庴偗晅偗偨偲偒丅yyyyy偼揹尮傪擖傟偰偐傜偺僗僥僢僾埵抲乮亄32766乣-32767偺斖埻偱壜曄挿乯
丂丒'ER:Cx????:yyyyy'丂丗僐儅儞僪傪庴怣偼偱偒偨偑丆僶僢僼傽偑偄偭傁偄偱張棟偱偒側偄丅
丂丒'DN:Cx____:yyyyy'丂丗強掕偺僗僥僢僾偑廔椆偟偨偲偒丅
丂丒懚嵼偟側偄僠儍儞僱儖斣崋傪巜掕偟偨帪傗捠怣僄儔乕偺応崌偼壗傕曉偟傑偣傫丅
丂丒暋悢偺儌乕僞傪愙懕偟偰偄傞偲偒偵丆僐儅儞僪憲怣偺廃婜偵傛傝傑偡偑丄摨帪偵忋婰DN儊僢僙乕僕偑暋悢偺PIC偐傜憲傜傟偰偔傞偙偲偑偁傞応崌傕峫偊傜傟傑偡丅偦偺応崌暥帤壔偗偟偰惓忢偵庴偗庢傞偙偲偑偱偒傑偣傫丅
椺偊偽丄揹尮搳擖屻乮儌乕僞偑掆巭偟偰偄傞忬懺偱乯
嘆'C0R050'僐儅儞僪傪憲偭偨応崌丄
嘇偡偖偵'OK:C0R050:0'偑曉偭偰偒傑偡(僞僀儈儞僌偵傛偭偰偼丄嵟屻偺'0'偑'1'偵側傞応崌傕偁傝傑偡)丅
嘊俆侽僗僥僢僾偟偨屻乮栺1.6昩屻乮50亐32乯乯偵'DN:C0____:50'偑曉偭偰偒傑偡丅
仠僒儞僾儖捠怣僜僼僩侾乮VB6偺僜乕僗僼傽僀儖乯
丂偁偔傑偱巊梡椺偲偄偆偙偲偱偍峫偊偔偩偝偄丅
丂偙偙偵偁傝傑偡丅偁偔傑偱嶲峫椺偲偄偆偙偲偱偍峫偊偔偩偝偄丅僒億乕僩偼偱偒傑偣傫丅
仠僒儞僾儖捠怣僜僼僩俀乮EXCEL 儅僋儘乯
丂偙偙偵偁傝傑偡丅偁偔傑偱嶲峫椺偲偄偆偙偲偱偍峫偊偔偩偝偄丅僒億乕僩偼偱偒傑偣傫丅
丂仸COM億乕僩斣崋偼1乣9偺斖埻偱偍巊偄偔偩偝偄丅USB-僔儕傾儖曄姺働乕僽儖傪巊梡偡傞嵺偼僨僶僀僗儅僱乕僕儍乕偵偰愝掕傪峴偭偰偔偩偝偄丅
仛巇條曄峏懳墳偺斖埻
丂丒巇條曄峏偼偁傝傑偣傫
僥僗僩夞楬(尒偊側偄棤柺偵掞峈侾杮偲僟僀僆乕僪俀杮偑偁傝傑偡)
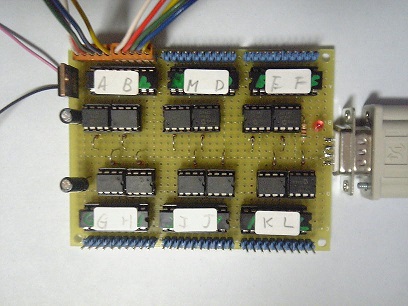
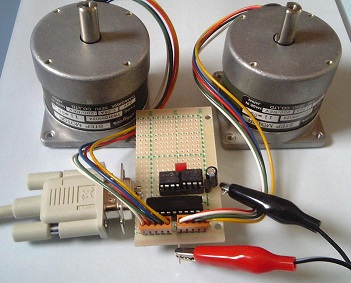
僗僥僢僺儞僌儌乕僞侾俀屄梡偺夞楬(棊嶥幰偺偛婓朷偵傛傝惢嶌偟偨暔偱偡)
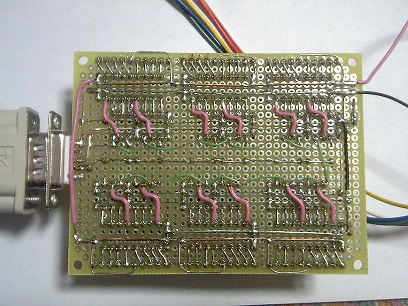
僗僥僢僺儞僌儌乕僞侾俀屄梡偺夞楬偺棤柺
僥僗僩夞楬偺夞楬恾(2007擭1寧18擔偐傜曄峏)
仸曗懌侾丂僩儔儞僕僗僞傾儗僀偲儌乕僞偺愙懕偼丄堦椺偲偟偰丄倃丗11,15丄倄:12,16丄倃亅丗13,17丄倄亅丗14,18丂偲偟偰偔偩偝偄丅
仸曗懌俀丂PIC偲僩儔儞僕僗僞傾儗僀偺娫偵LED傪擖傟傞乮係屄亊俀乯偲丄椼帴偝傟偰偄傞憡偑偳傟偱偁傞偐丄娙扨偐偮梕堈偵敾暿偱偒傑偡丅僩儔儞僕僗僞傾儗僀撪晹偵掞峈偑偁傞偨傔丄揹棳惂尷掞峈偼晄梡偱偡丅
仸曗懌俁丂幨恀侾枃栚偺儌乕僞傪巊梡偡傞応崌丄儌乕僞偺僐僱僋僞偺攝楍偼丄忋偐傜乽墿丄惵丄椢丄愒丄敀乿偺弴偱偡丅
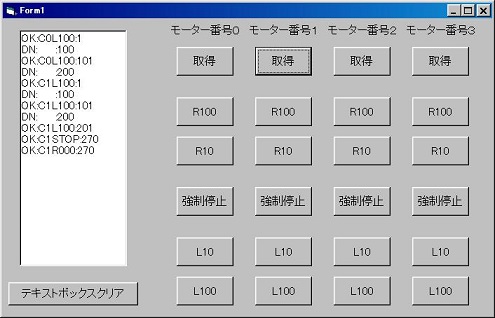
僥僗僩梡僜僼僩乮VB6乯偺幚峴夋柺
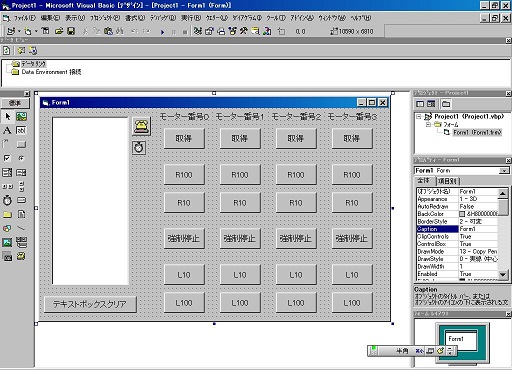
僨乕僞捠怣僜僼僩乮VB6乯偺嶌惉夋柺
仠僆乕僋僔儑儞娭學僩僢僾儁乕僕傊(懠偵傕偄傠偄傠偲弌昳偟偰偄傑偡)
仠PIC娭楢偺弌昳暔偺擖嶥傪峫偊偰偄傞曽偵乮昁偢偍撉傒壓偝偄乯
壓婰偑僜乕僗僼傽僀儖偱偡丅嶲峫掱搙偲偄偆偙偲偱偛棟夝偔偩偝偄丅
Private Sub Command1_Click(Index As Integer)
'L100儃僞儞偑墴偝傟偨
MSComm1.Output = "C" + CStr(Index) + "L100"
End Sub
Private Sub Command2_Click(Index As Integer)
'L10儃僞儞偑墴偝傟偨
MSComm1.Output = "C" + CStr(Index) + "L010"
End Sub
Private Sub Command3_Click(Index As Integer)
'嫮惂掆巭儃僞儞偑墴偝傟偨
MSComm1.Output = "C" + CStr(Index) + "STOP"
End Sub
Private Sub Command4_Click(Index As Integer)
'R10儃僞儞偑墴偝傟偨
MSComm1.Output = "C" + CStr(Index) + "R010"
End Sub
Private Sub Command5_Click(Index As Integer)
'R100儃僞儞偑墴偝傟偨
MSComm1.Output = "C" + CStr(Index) + "R100"
End Sub
Private Sub Command6_Click(Index As Integer)
'庢摼儃僞儞偑墴偝傟偨
MSComm1.Output = "C" + CStr(Index) + "R000" ' L000丂偱傕ok
End Sub
Private Sub Command7_Click()
Text1.Text = "" ' 僋儕傾偟傑偡
End Sub
Private Sub Form_Load()
MSComm1.CommPort = 5 ' 偛巊梡偺COM億乕僩斣崋傪巜掕偟偰偔偩偝偄丅
MSComm1.Settings = "9600,n,8,1" ' 曄峏偟側偄偱偔偩偝偄
MSComm1.PortOpen = True ' 億乕僩偺巊梡奐巒偟傑偡
MSComm1.InputLen = 0
Timer1.Interval = 10 ' 僞僀儅乕傪巊梡奐巒
End Sub
Private Sub Form_Unload(Cancel As Integer)
MSComm1.PortOpen = False ' 億乕僩偺巊梡廔椆
End Sub
Private Sub Timer1_Timer()
' 曉怣偝傟傞儊僢僙乕僕傪僥僉僗僩儃僢僋僗偵擖傟傑偡
Text1.Text = Text1.Text + MSComm1.Input
End Sub
</PLAINTEXT><BR><BR></BODY></HTML>
</plaintext></body>