ストロベリーリナックスさんにて販売しているマイクロステップが可能なステッピングモーターのドライバー用コントローラー
●概要
ストロベリーリナックスさんにて販売しているマイクロステップが可能なL6470を使用したステッピングモーターのドライバーを手軽・簡単に操作するためのインターフェイスです。このモーター・ドライバーは、SPIにてコマンドを送る必要があるため、マイコン等の知識が必要であるため、「少し回してみたい」、「ちょっと使ってみたい」といった場合でも簡単に使えない、やや敷居が高いものとなっています。
ここで紹介するセットでは、機能は限定されるものの、PCやマイコンの知識がなくても、簡単な回路構成で手軽にモーターを回すことができます。「とりあえずマイクロステップを体験したい」という用途に最適です。PCと接続しない場合は、6つの押しボタンスイッチ、あらかじめ登録している正転・逆転・停止等の操作ができるようになっています。もちろん、PCを使って、様々なコマンドを送信し、操作を行うことができます。
PCを使って操作する場合も、手軽に操作できるように、PCの専用ソフトはなくEXCELのマクロ(VBA)を使ってドライバーのコマンドを送信できるようにしました(PCにはEXCELが、接続のため、FTDI社製等の「USB-シリアル変換」が必要となります。)
先のとおり、6つのスイッチにはあらかじめ正転・逆転・停止等の操作ができるようコマンドを登録しています。この6つの押しボタンには、購入時とは異なるコマンドを登録できる(登録のためにはPC接続が必要です。)様にしていますので、例えば、正転・逆転のスピードを、登録されているものと別のものに書き換えるなどできます。
●お送りする部品リスト
| 名称 | 規格等 | 数量 |
| PIC | 16F1827 | 1 |
| タクトスイッチ | 不明 | 6 |
| 抵抗 | 33kΩ程度 | 5 |
| 抵抗 | 1.8kΩ程度 | 1 |
| 抵抗 | 1kΩ程度 | 1 |
| LED | 赤色 | 1 |
| コンデンサ | 100μF程度 | 1 |
| ジャンパ用ヘッダ | 2P | 2組 |
※PCと接続するためには、別途「シリアル-USB変換」およびUSBケーブルが必要です。秋月電子通商さんの「超小型USBシリアル変換モジュール」を想定しています。
●仕様・操作方法
・ドライバーのコマンドは、正転・逆転等以外に多数が存在しますが、4バイト以内で構成されているため、マクロでは4バイトまでの送信に対応しています。
・マクロにて送信するデータは、下記の6つのスイッチに割り当て(下記参照)を行う以外に、有効なコマンドである場合は、EEPROMに保存します。
・有効なコマンドは、1バイト目が、0x01以上0x20未満であるかどうかで判別しています。
・有効なコマンドは、次回電源投入時の初期値として認識し、次回電源投入時に、自動送信することができます(自動送信の有無は、ジャンパーにて設定可能)。同じコマンドを複数設定した場合は、最終値を記憶します。
例えば、加速度の設定などを行っておけば、次回電源投入時にもその加速度設定が再現されます。
・保存したEEPROMデータは、ジャンパーにて、出荷時設定に戻すことができます。電源投入時のジャンパー設定(ジャンパー有り)により出荷時設定になります。
6つの押しボタンスイッチ
・あらかじめ、出荷時に、6つの押しボタンに、正転・逆転・停止等のコマンドを割り付けています。
・この割り付けは、変更が可能です(PCとの接続が必要となります)。
・割り付けの方法は、割り付けを希望するスイッチを押しながら、PCからコマンドを送信すれば、そのコマンドが記憶されます。
・6つの押しボタンに割り付けたコマンドは、ジャンパーにて、出荷時設定に戻すことができます。
・6つの押しボタンにあらかじめ割り付けているコマンド(出荷時設定)は下表のとおりです。
・押しボタンに割り付けるコマンドは、回転だけではなく、例えば、加速度設定なども割付可能です。
| スイッチ番号 | コマンド | コマンドの内容 |
| SW1 | 0x50, 0x00, 0x19, 0x00 | 正転(約2秒/1回転) |
| SW2 | 0x51, 0x00, 0x19, 0x00 | 逆転(約2秒/1回転) |
| SW3 | 0x50, 0x00, 0x05, 0x00 | 正転(約10秒/1回転) |
| SW4 | 0x51, 0x00, 0x05, 0x00 | 逆転(約10秒/1回転) |
| SW5 | 0x51, 0x00, 0x01, 0x00 | 逆転(約50秒/1回転) |
| SW6 | 0xb0 | 停止 |
●EXCELファイル(マクロを有効にする必要があります。内容についてはサポート対象外です。)
・パラメータの書き込みと読み込みの区別なく、指定したコマンド(数値)を送信します。
なので、書き込みの際にも送信に合わせてデータを取得するようにしています。書き込みの際には無効なデータ(通常は0x00)を取得します。
●注意
・コマンドの種別によっては、モーター回転中などの動作状態によっては受け付けないものがあります。詳しくはL6470のデータシートを参照してください。
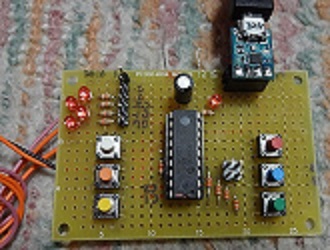
回路写真(製作例、「お送りする部品リスト」にない部品も使用しています。)
回路写真(製作例、醜いです。「お送りする部品リスト」にない部品も使用しています。)
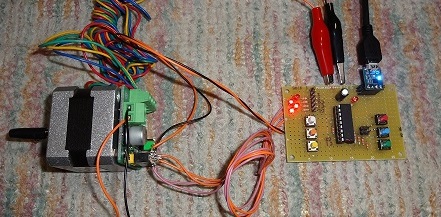
回路写真(PCとの接続)
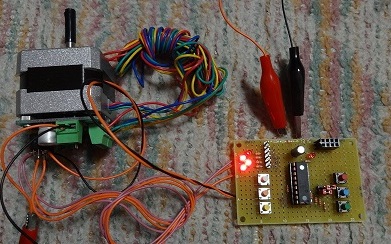
回路写真(PC無しで操作)
回路図
「USB-シリアル変換」から、USBの5V出力が得られるため、それを回路電源とすることができますが、万一誤結線すれば、USBポートが破損する恐れがあります。
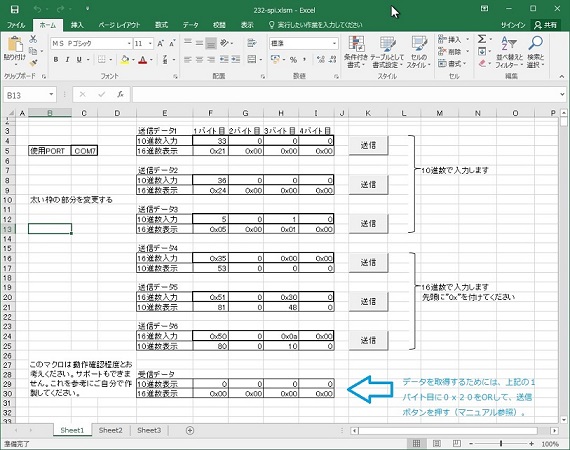
EXCEL操作画面
コマンドの種別によっては、モーター回転中などの動作状態によっては受け付けないものがあります。詳しくはL6470のデータシートを参照してください。
●オークション関係トップページへ(他にもいろいろと出品しています)
●PIC関連の出品物の入札を考えている方に(必ずお読み下さい)