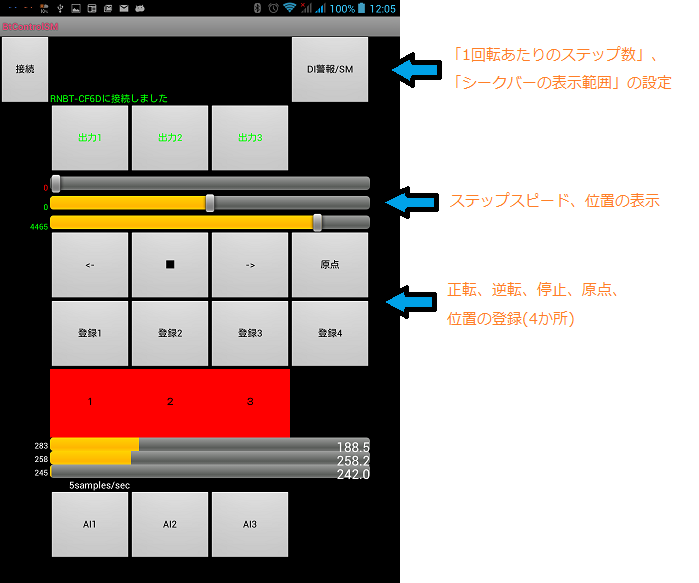
制御アプリのスクリーンキャプチャ
(デジタル出力、デジタル入力、アナログ入力等については、「androidスマートフォン・タブレットとBluetoothで無線接続する入出力装置」を参照してください。)
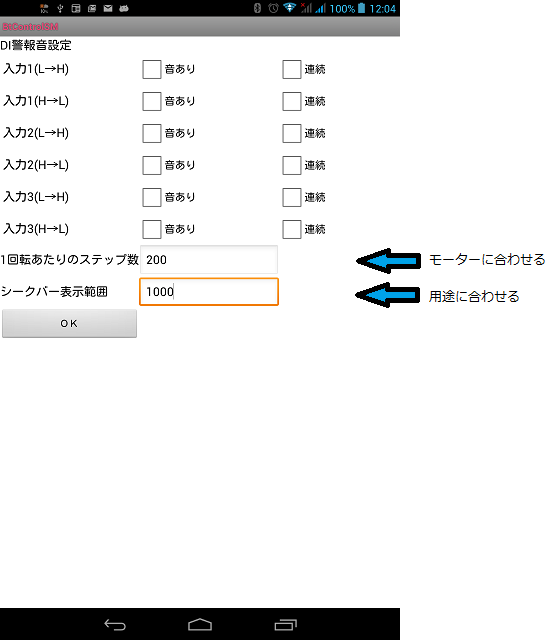
「DI警報/SM」設定画面のスクリーンキャプチャ
回路図(Bluetoothモジュールへの5V電源供給は、下記の写真を参照)
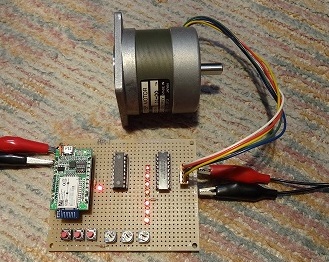
回路写真1(回路図に記載のないパーツも実装しています。テストのため、DIはタクトスイッチ、AIは半固定抵抗、DOはLEDをそれぞれ3個実装しています。)
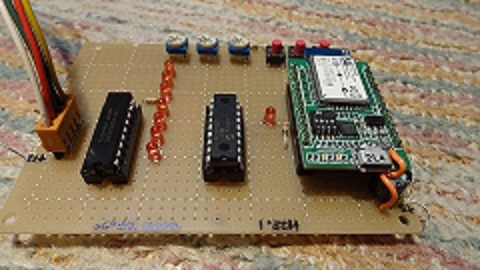
回路写真2

回路写真3(オレンジの線は5V電源の供給用、DIPスイッチはすべてOFFとする)
●オークション関係トップページへ(他にもいろいろと出品しています)
●PIC関連の出品物の入札を考えている方に(必ずお読み下さい)